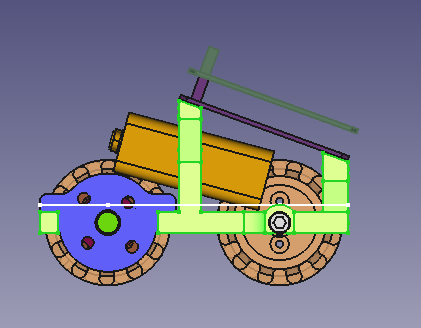
This is looking great now. Forgot to mention here is the
https://raw.githubusercontent.com/rosmo ... _ESC.step (rosmo_esc.step)
For the encoder, I think we need something like this
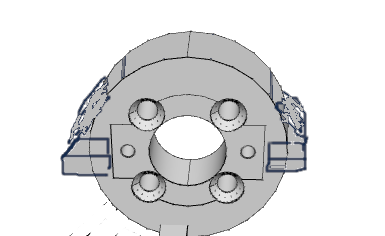
(excuse very crappy pic) It's a single part that you first screw to the motor (note countersunk holes) After you bolt to the motor you screw on the encoder.
The two badly drawn tabs protruding towards us are where the bolt holes are, whic bolt to the rest of the chassis. The part needs some extra material front and back (crappily drawn in) to make it long enough and strong enough. We may have to make the 'shaft' longer to accommodate this additional length.
* If both encoder cables could exit the top that would be ideal, I think we'd bash them pretty quickly with a bottom exiting one
* Screw holes/sockets in the PCB support struts will be needed, Or add those nut holders as seen on front-wheel axles?
* A little material needs to be removed between the spinning motor and chassis, just 1mm or whatever so it doesn't rub.
* We can tape the battery in for now, but slightly more holding would be a nice to have
Thanks for all your work, it's looking really cool.
I can't wait to print one!